- # видео | Роботы-пауки плетут удивительные настенные сети
- Робот-паук — еще одна технотварь, которая поселится в ваших кошмарах
- Четвероногий робот-паук на Arduino
- Материалы
- Шаг 2: пайка компонентов и загрузка кода
- Шаг 3: сборка корпуса
- Шаг 4: подключение и тестирование
- Шаг 5: улучшения на будущее
- Инверсная кинематика
- HEXAPOD или робот-паук, как способ автоматизации строительных работ.
- Подпишитесь на автора
# видео | Роботы-пауки плетут удивительные настенные сети
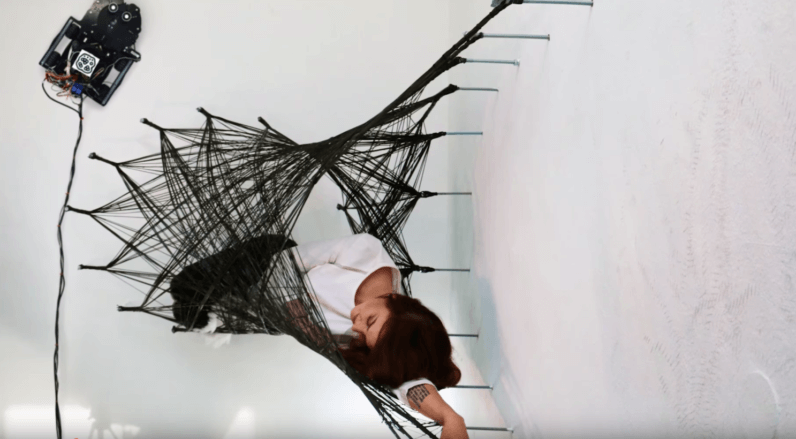
Пауки – удивительные создания, способные вызывать в людях одновременно ужас и восхищение. Немецкие учёные из Штутгартского института вычислительного дизайна (ICD) вдохновились пауками при проектировании пары удивительных роботов, перемещающихся по стенам и плетущим свои сети из троса на основе углеродных волокон. В получившихся конструкциях по завершении процесса вполне может спать, словно в гамаке, взрослый человек. Разработчики роботов называют свою концепцию «роевым строительством», так как роботы постоянно взаимодействуют друг с другом.
«Сейчас мы находимся в самой начальной точке нашего пути в плане исследования архитектурного потенциала подобной строительной системы. Но мы уверены, что при помощи таких роботов в будущем можно будет создавать такие структуры, которые невозможно будет воздвигнуть другими способами», — поясняет руководитель исследования из ICD Аким Менгес.
В видео чуть ниже вы можете наблюдать, как два робота-паука плетут свою удивительную сеть. Пока это всего лишь настенный гамак, но представьте, что такие малютки смогут создавать в будущем, когда учёные усовершенствуют их и научат работать с другими материалами, помимо тросов. Активное взаимодействие двух механических строителей – это потрясающее зрелище, даже несмотря на то, что мы наблюдаем раннюю стадию данного эксперимента. Учёные в данный момент совершенствуют программное обеспечение роботов, чтобы научить их работать на разных поверхностях и в самых разных условиях.
Источник
Робот-паук — еще одна технотварь, которая поселится в ваших кошмарах

Каждый новый новый день — новый повод для технопаранойи. То Boston Dynamics изобретает робо-помесь ягуара и степлера, которая способна лазать по стенам, то менее известная контора догадается прикрепить пулеметы к квадрокоптеру. Сегодня вашим генератором кошмаров станет Bionic WheelBot — робот-паук, способный сворачивать свои острые лапы в клубок ненависти и разгоняться с его помощью как полоумная тварь.
Немецкая компания Festo существует уже почти сотню лет — с 1925 года. За это время семейный бизнес дорос от мануфактуры, производящей инструменты для рубки леса, до фирмы, специализирующейся на роботах и высоких технологиях. Своей главной узнаваемой фишкой Festo избрала робо-животных — механизмы, заимствующие способы перемещения у мира насекомых и зверей. До этого инженеры компании уже производили прототипы в виде стрекоз, бабочек и кенгуру. На этот раз им пришла идея взять за основу паука под названием Capparaceae aureola.
Это маленькое животное обычно не вырастает больше двух сантиметров, живет в Намибийской пустыне и отличается уникальной привычкой трансформировать свои ноги в подобие колес для того, чтобы стремительно убегать (точнее, даже уезжать) от хищников. Созданный по его подобию робот-паук может неспешно бродить на своих острых лапках, а потом в мгновение ока собираться в жутковатую колесницу и умчать на большой скорости.
Bionic WheelBot создан как прототип не для какой-то определенной цели или продажи, а в качестве демонстрации возможностей компании для выставки высоких технологий Hannover Messe 2018, которая пройдет в Германии. Вообще, этот паук, вызывающий смутную доисторическую тревогу, должен, в первую очередь, заинтересовать военных. Вряд ли пожарные службы или аграрии заинтересуются чем-то настолько жутким и одновременно прекрасным. А вот представить нечто подобное в виде разведчика или обвешанной пулеметами машины смерти — очень просто.
Источник
Четвероногий робот-паук на Arduino

Майлз – это робот-паук на базе Arduino Nano, использующий 4 ноги для ходьбы и маневрирования. В качестве приводов для ног используются 8 сервомоторов SG90 / MG90. Специально сделанная плата позволяет управлять моторами и подавать питание на них и Arduino Nano. В плате есть специальные слоты для модулей IMU, Bluetooth и инфракрасного датчика, придающего роботу автономности. Тело собирается из нарезанного на лазерном резаке плексигласа толщиной 2 мм, но его можно и распечатать на 3D-принтере. Отличный проект для энтузиастов, изучающих тему с инверсной кинематики в робототехнике.
Вдохновлён проектом mePed (www.meped.io), и использует код на его базе.


Материалы
- Плата (1)
- Miles компоненты для сборки корпуса.
- SG90/MG90 сервомоторы (12)
- Aduino Nano (1)
- LM7805 регулятор напряжения (6)
- Выключатель (1)
- 0.33uF электролитический конденсатор (2)
- 0.1uF электролитический конденсатор (1)
- 3.08mm 2 pin коннектор Phoenix (1)
- Коннекторы «папа» для сервомоторов.
Опционально:
- 2 pin коннектор Relimate (1)
- 10 pin коннектор Relimate (1)
- 4 in коннектор Relimate (1)
Шаг 1: разработка схемы и платы
Я свои платы проектирую в Altium. 12 сервомоторов SG90/MG90 могут потребить до 4-5 А при одновременной работе, поэтому схема должна уметь обрабатывать большие токи. Я использовал регуляторы напряжения 7805 для питания моторов, однако каждый из них может выдавать максимум по 1 А. Поэтому я соединил 6 LM7805 параллельно, увеличив доступный выходной ток.
Схемы и файлы Gerber качайте по ссылке.
- Для измерения углов используются MPU6050/9250.
- Выходной ток до 6 А.
- Изолированное питание сервомоторов.
- Выход для ультразвукового датчика HCsr04.
- Есть периферия для Bluetooth и I2C/
- На Relimate есть все аналоговые контакты для датчиков и приводов.
- Выходы с 12 сервомоторов.
- Индикаторный светодиод.
Особенности платы:
Шаг 2: пайка компонентов и загрузка кода

Паяйте компоненты по мере увеличения их роста, и начинайте с устройств с поверхностным монтажом.
В моей схеме есть всего один ТМП резистор. Добавьте контакты «мама» к Arduino и LM7805, чтобы их по необходимости можно было менять. Припаяйте контакты «папа» к коннекторам моторов.
Схема использует питание 5 В, раздельно для моторов и Arduino. Проверьте на отсутствие закорачивания на землю всех шин питания – выход с Arduino 5 В, выход с моторов VCC и вход 12 В на Phoenix.
Проверив плату, можно программировать Arduino. Тестовый код я выложил на Github. Залейте его и соберите робота.
Шаг 3: сборка корпуса
Всего робот состоит из 26 деталей, которые можно распечатать на 3D-принтере или нарезать из плексигласа толщиной 2 мм. Я использовал листы красного и синего плексигласа 2 мм, чтобы робот был похож на Спайдермена.
В корпусе есть несколько соединений, которые можно закрепить при помощи болтов и гаек М2 и М3. Сервомоторы крепятся болтами М2. Установите батарейки и плату перед тем, как прикручивать крышку.
Шаг 4: подключение и тестирование
Подключайте в следующем порядке:
- Передний левый поворотный мотор.
- Передний левый подъёмный мотор.
- Задний левый поворотный мотор.
- Задний левый подъёмный мотор.
- Задний правый поворотный мотор.
- Задний правый подъёмный мотор.
- Передний правый поворотный мотор.
- Передний правый подъёмный мотор.
Запускайте робота, передвинув выключатель.
Шаг 5: улучшения на будущее
Инверсная кинематика
Текущий код использует позиционный подход – мы задаём углы, на которые моторы должны повернуться для осуществления определённого передвижения. Инверсная кинематика даст роботу ходить более изощрённо.
Источник
HEXAPOD или робот-паук, как способ автоматизации строительных работ.
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых постах.
Отписаться от уведомлений вы всегда сможете в профиле автора.
За несколько последних десятилетий развитие науки и техники достигло больших высот. В связи со стремительным развитием робототехники во всем мире, появилась возможность упростить, ускорить и автоматизировать многие процессы, которые раньше требовали больших трудозатрат и рисков.
Строительство зданий и сооружений требует тщательной подготовки. Для этого необходимо большое количество высококлассных специалистов в области строительства: архитекторы, геологи, геодезисты, каменщики, электрики и др. Многие из них при выполнении работ подвергаются опасным факторам, таким как агрессивная среда, высотные работы, тяжелые климатические условия. Всё это требует высоких трудозатрат, материальных вложений и рисков.

В настоящее время задачей прогрессивного строительства является автоматизация процессов и повышение производительности опасных и высокоточных работ.
Я предлагаю кардинально новый способ проведения некоторых работ при строительстве объектов. Для автоматизации этих процессов будет использоваться роботизированное автоматическое устройство, называемое гексапод, с закреплённым к нему манипулятором, который будет проводить определённые работы.
Благодаря стопоходящему передвижению данный робот сможет перемещаться на различных видах поверхностей, взбираться на возвышения и с большой точностью совершать манипуляции с различными модулями.
Манипулятор на гексаподе служит для захвата объектов и перемещения их в пространстве. Так же к нему могут крепиться различные установки, например для заливки стяжки полов или фундамента, для бурения или сверления, сварочный аппарат. За счет встроенных датчиков, таких как инфракрасные, ультразвуковые или оптические, гексапод сможет ориентироваться не только днем, но и в темное время суток. При помощи специально разработанного ПО робот построит трехмерную модель полигона (участок, в котором проходит строительство) и в режиме реального времени будет сообщать о процессе строительства по средством протокола MQTT или же иных средств для передачи данных.
За счет модульного строительства (применение модулей из которых собирается сооружение, что напоминает сборку конструктора), собирать при помощи различных установок, гексапод сможет в буквальном смысле собирать и сцеплять модули между собой. В виду того, что гексапод имеет несколько типов походки и режимов управления, тот может выступать как в роли подъемного крана, так и в роли грузоперевозчика.
В настоящее время важным является автоматизация различных видов работ. Это дешевле, чем нанимать множество рабочих, значительно ускоряет процесс и повышает его точность. Технологии 21-го века позволяют создавать мощные мехатронные устройства, которые будут выполнять большинство однотипных работ, требующих от человека времени, концентрации внимания и рисков для жизни. Конечно же, на начальном этапе разработки требуется большое количество материальных вложений, но с массовым производством роботов и усовершенствованием их, удешевиться и их производство.

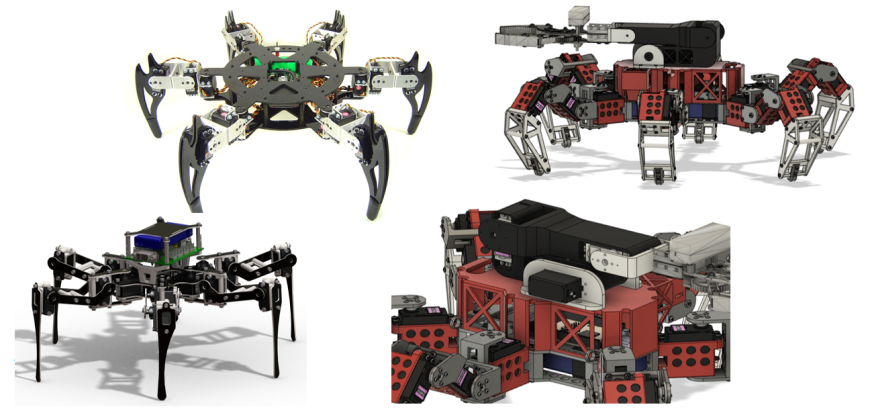
В данной модели применяется большее количество приводов, улучшенная модель ног и платформы, повышающая мобильность и гибкость. В данном роботе используется микроконтроллер Arduino mega 2560, усовершенствованная схема питания и реализовано беспроводное управление. Для создания данного проекта потребовалось приобретение 3Д принтера, мультиметра и различного CAD инструмента, объединяющий процессы разработки проекта. В данный момент на гексаподе не установлен манипулятор, но для него предусмотрено место крепления, а так же запас питания и вычислительные мощности контроллера управления.
Для изготовления деталей гексапода был приобретен FDM (Fused Depsition Modelling) 3д принтер Flying Bear Ghost 4s. Данный принтер является одним из лучших в своей ценовой категории. Он печатает пластиками PLA,Pet-G, ABS и другими. Хорошая кинематика этого принтера предотвращает повреждение деталей во время печати. Специально подогревающийся стол улучшает адгезивные свойства для лучшего сцепления детали с его поверхностью.
Основным материалом для изготовления был выбран PET-G так как его физико-механические свойства отлично подходят для гексапода. Демпферы были напечатаны из материала Bflex.
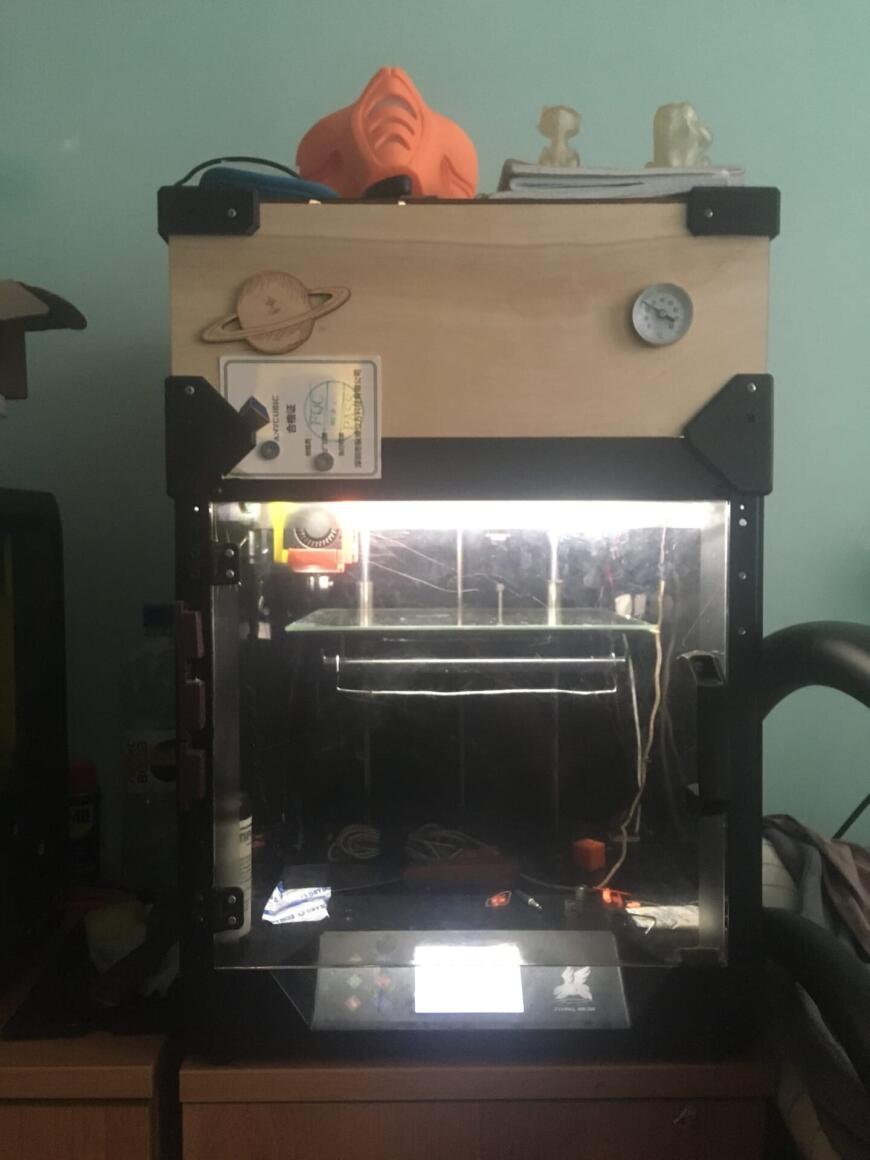
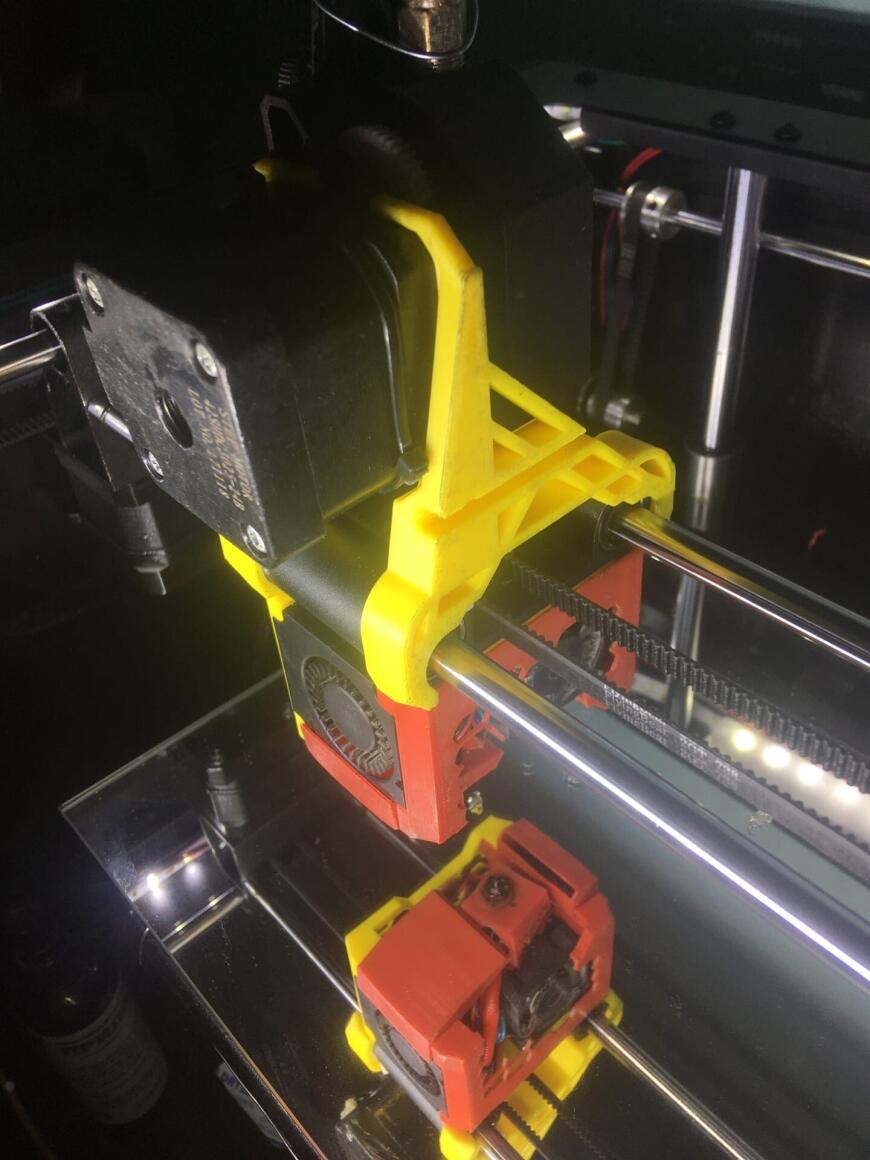
Для улучшения качества напечатанных моделей, была доработана конструкция принтера. Вместо изначально установленного bowden экструдера, был напечатан и установлен direct. Откалиброван PID для стола и нагревательного элемента, шаги для мотора экструдера, заменены драйвера для шаговых двигателей на осях X,Y,E. Собрана термокамера из верхнего бокса (фанера) и передней дверцы (акрил), заменено стоковое стекло на зеркало 3мм.
Так же был проведен расчет коэффициента усадки для точной печати отверстий.
Далее о создании данной модели гексапода
3д модель гексапода :

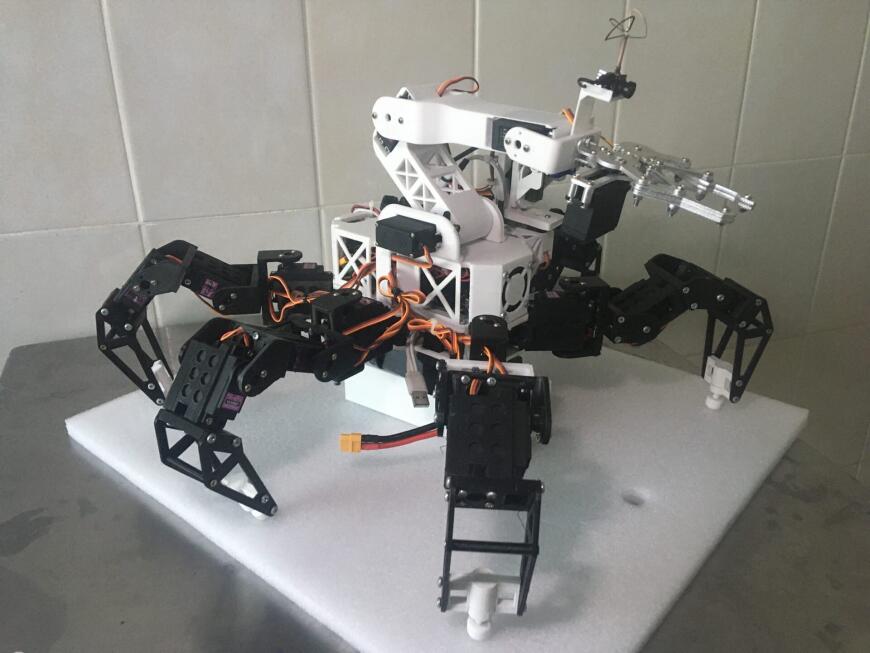
Робот разрабатывался на основе аналогичных существующих моделей, в том числе и роботов-гексаподов. В результате работы были значительно улучшены различные модули и усовершенствована конструкция ног, что потребовало использования 18 сервоприводов. Это позволило повысить мобильность и гибкость робота. Чертежи и модели частей корпуса робота полностью разрабатывались в CAD системе и производились при помощи аддитивных технологий. По 3д моделям можно производить технологические расчеты и использовать при дальнейшем производстве.
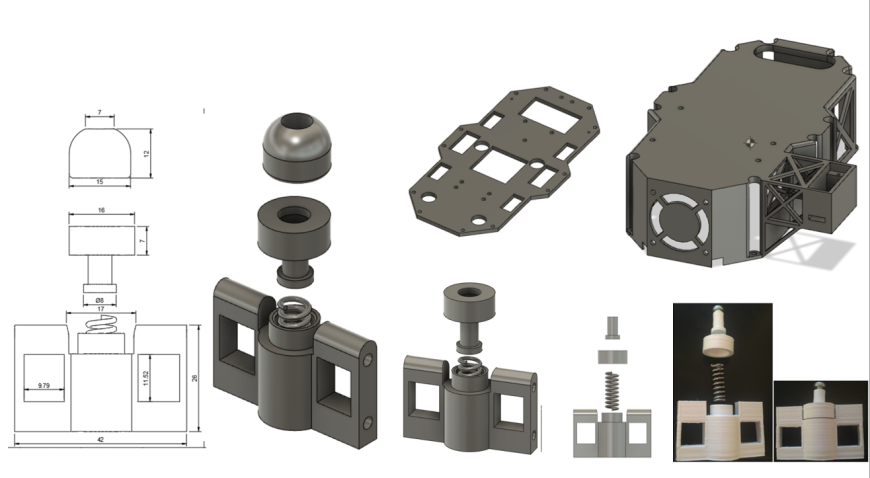
На концы ног разработаны и установлены наконечники-демпферы собственного производства. Они представляют собой пластиковый корпус с пружиной внутри. Наконечник предотвращает поломку элементов ноги во время удара, уменьшает нагрузку на вал редуктора сервопривода и устраняет его деформацию и износ, а так же избавляет от сильного стука во время перемещения. Улучшена конструкция платформы, благодаря чему на нее можно устанавливать манипулятор, кулер для охлаждения, а так же стабилизатор для FPV камеры.
В гексаподе используется микроконтроллер Arduino mega 2560 с дополнительно установленной Raspberry pi 4. Это позволяет плавно и с большой точностью перемещать робота. Так же были усовершенствованы: схема питания, которая позволила включать и выключать робота при помощи контроллера, и беспроводное управление, которым осуществляется движение робота, манипулятора и управление камерой. Присутствует возможность подключиться к гексаподу дистанционно по средством передачи данных wi-fi, а так же можно расширить функционал и управлять мехатронным устройством дистанционно. Робот изготовлен с учетом промышленных стандартов во избежание травматизма, на нем располагается кнопка аварийной остановки, а вся электроника помещена корпус. Светодиодный индикатор для отладки и отображения состояния робота собран и представлен на фотографии.


Одним из основных частей гексапода является манипулятор. Он выполнен из PET-G пластика на 3д принтере. Манипулятор и его кинематика проектировались в CAD системе по собственным чертежам и наработкам. Манипулятор состоит из 3 звеньев и захвата, которые вращаются в одной плоскости. В роли двигателей используются сервоприводы, крутящий момент которых >10кг/см. Манипулятор способен поднимать объекты массой до 500 грамм и до 1000 в режиме удержания. Так же в роботе установлена FPV камера, которая позволяет управлять роботом дистанционно и камера для машинного зрения, обеспечивающая распознавание объектов и дальнейшим выводом их на монитор.
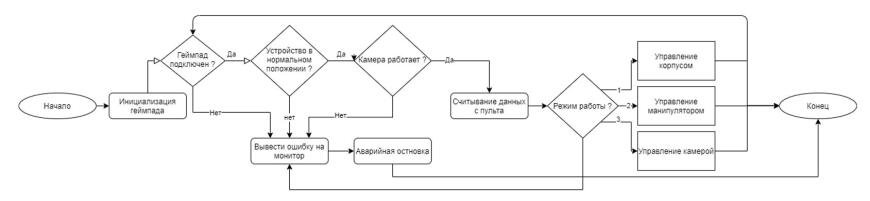
Программирование производилось в среде разработки Arduino IDE и sublime_text . Код состоит из функций, которые контролируют модули, и функций, которые ими управляют. В программе реализованы аварийные остановки и вывод ошибок при не правильном подключении или во время отклонений наклона корпуса от нормы. >60% программного обеспечения разрабатывалось вручную.
Для управления гексаподом используется геймпад от PlayStation2 с ресивером. Он позволяет точно управлять движением, выбирать различные типы походки и выбирать режимы управления. Беспроводное управление реализуется за счет встроенного радио модуля на 2.4гц . Приемник устанавливается на верхнюю часть платформы корпуса гексапода и подключается к Arduino mega (для передачи сигнала используются пины 2-5, а так же пины 3.3в и Gnd для питания).
В качестве источника питания для гексапода используются li-ion аккумуляторы. Для стабилизации напряжения используется стабилизатор бортового напряжения SBEC.
В качестве батареи используются li-ion аккумуляторы формата 18650. К преимуществам можно отнести:
— Высокая энергетическая плотность.
— Отсутствие эффекта памяти.
— Низкий удельный вес.
Аккумуляторы собираются последовательно в 3s батарею (12.6в).
В роли стабилизатора используется стабилизатор бортового напряжения YEP 20A HV (2
12S) SBEC. По причине того, что на каждом сервоприводе просадка напряжения достигает 0.3в., суммарно, со всех двигателей, просадка по напряжению принимает значение до 6в., вследствие чего многие приводы не работают. Так же каждый привод потребляет до 800мА, опытным путем было выявлено, что суммарный потребляемый ток примерно 15А.
Исходя из вышеупомянутых проблем, стабилизатор должен соответствовать нескольким требованиям:
• Максимальный ток 20А
• Выходное напряжение 5-7.2в
Данным требованиям соответствует стабилизатор бортового напряжения YEP 20A HV
- Ток: 20A
- Входное напряжение: 2-12S
- Выходное напряжение: 5V / 5.5V / 6V / 7В / 9В
- PCB Размер: 57x26mm
- Вес: 42g
Источник