Строительные работы по сооружению контактной сети
До начала строительных работ осуществляют разбивку мест установки опор согласно планам контактной сети перегонов и станций, разработанным проектной организацией. Положение оси опор отмечают нанесением вертикальной черты, номера и типа опоры несмываемой краской на шейке наружного рельса с полевой стороны. Одновременно отмечают габаритное расстояние от оси пути до опоры.
Котлованы под опоры, анкеры и фундаменты разрабатывают главным образом механизированным способом, используя котло-ванокопатели, буровые машины, экскаваторы и другие механизмы. Во избежание повреждения подземных коммуникаций специальными искателями определяют места положения коммуникаций. При невозможности применения средств механизации из-за наличия подземных коммуникаций котлованы разрабатывают вручную. Близость расположения котлованов к действующему пути требует тщательного соблюдения требований безопасности движения поездов и работающих лиц при производстве работ. На время производства работ машинистам поездов выдают предупреждения о повышении бдительности или снижении скорости движения в особо опасных местах.
Руководитель работ наблюдает за состоянием земляного полотна и креплений котлованов. При значительном притоке в котлован воды ее откачивают и устанавливают шпунтовые ограждения. Котлованы разрабатывают в сжатые сроки и работы организуют так, чтобы фундаменты, анкеры и опоры устанавливались в то же «окно» или в срок не более суток во избежание обрушения стенок и нарушения их несущей способности.
Многоковшовые котлованокопатели ВК для работы с пути монтируют на дрезине ДГК7 (рис. 15.6), а котлованокопатели МКТС для работы с поля — на тракторе (рис. 15.7). Они позволяют разрабатывать котлованы размером 0,7 х 0,9 м глубиной до 5 м за два или несколько проходов. Вылет рабочего органа от оси машины 3,5—6,0 м. Средняя производительность котлованокопателя на железнодорожном ходу за 1 ч работы в талых грунтах — 8 котлованов и в мерзлых — 4. Машина на тракторном ходу разрабатывает за смену 15—18 котлованов в талых грунтах и 7—9 в мерзлых. Скорость передвижения дрезин до 80, тракторов — до 7,5 км/ч.
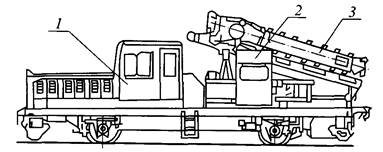
Рис. 15.6. Вертикальный котлованокопатель на железнодорожном ходу ВК-3: 1 — кабина дрезины; 2 — кабина управления; 3 — буровое устройство
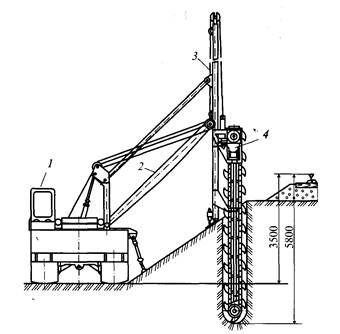
Рис. 15.7. Многоковшовый котлованокопатель на гусеничном ходу
МКТС-2: / — кабина; 2 — стрела; 3 — направляющая рама;
4 — рабочий орган
Котлованы под опоры, устанавливаемые без лежней, разрабатывают также буровой машиной БМ на базе автомотрисы АДМ-1С (рис. 15.8) и БМТС-2 на базе дрезины ДГК7. Процесс бурения состоит из четырех операций: заглубление бура на 0,8—1 м, подъем его с грунта над поверхностью земли, разбрасывание грунта под влиянием центробежной силы от быстрого вращения бура и опускание не-вращающегося бура в котлован. Циклы бурения повторяют до достижения необходимой глубины, после чего машину переводят в транспортное положение и она следует к очередному котловану. Общая продолжительность всего цикла работ с передвижением к очередному котловану составляет 20 мин.
Буровая машина отрывает котлованы диаметром 0,65 м, глубиной 5,0 м при вылете рабочего органа 2,7—6,7 м от оси; ее про
Рис. 15.8. Автомотриса АДМ-1С: 1 — буровая установка; 2 — кран-манипулятор; 3 — телескопическая вышка; 4 — неизолированная рабочая
площадка; 5 — кабина
изводительность за 1 ч работы составляет 10—12 котлованов в талых грунтах и 6—8 в мерзлых.
Агрегат для вибропогружения свайных фундаментов АВФ-1 применяют для вибропогружения трехлучевых фундаментов, анкеров и свай под сборные фундаменты опор контактной сети в талые грунты. Он имеет погрузочно-зарядное и опорно-поворотное устройства, на последнем установлено рабочее оборудование (выдвижная и поворотные фермы, направляющая рама, каретка вибропогружателя) для захвата и вибропогружения опорных конструкций. Силовая установка — дизель-электрический агрегат.
Техническая производительность вибропогружения свайного фундамента — не менее 3 шт/ч, масса погружаемого фундамента
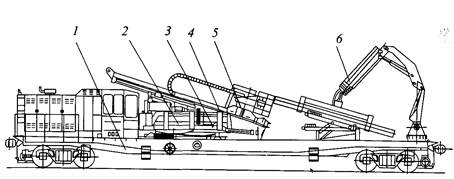
Рис. 15.9. Агрегат для вибропогружения свайных фундаментов МС (модернизированный вариант АВФ-1): 1 — платформа; 2 — поворотная рама; 3 — выдвижная ферма; 4 — направляющая рама; 5 — вибропогружатель; 6 — погрузочно-зарядное оборудование
или сваи — до 2,6 т. Длина погружаемых свай — до 5,6 м, фундаментов — до 4,5 м; глубина погружения фундамента от УГР — 5,0 м. Расстояние от оси пути до внутреннего края устанавливаемых оснований 3,1—5,7 м (рис. 15.9).
Буровые машины УКБС-2Г, МРКС-1А (рис. 15.10) монтируют на- четырехосной платформе и перемещают автомотрисой или тепловозом.
Для разработки котлованов под фундаменты станционных опор гибких поперечин применяют одноковшовые экскаваторы с обратной лопатой вместимостью 0,25—0,35 или 0,5—0,65 м 3 . Наиболее пригоден для разработки котлованов экскаватор Э-221 на базе
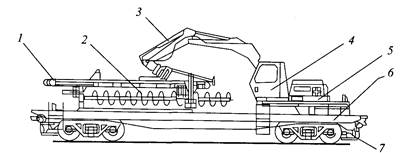
Рис. 15.10. Машина МРКС-1А: 1 — захват; 2 — буровое оборудование;
3 — манипулятор; 4 — кабина; 5 — силовая установка;
6 — базовая платформа; 7 — привод хода
колесного трактора «Беларусь», который разрабатывает котлованы глубиной 3,2 м от уровня его стоянки. На этом же тракторе смонтирован нож для предварительной срезки грунта.
Для бурения скважин в скальных породах применяют универсальный комплекс УКБС-2Г или другие буровые машины. В отдельных случаях для рыхления скального грунта применяют взрывные работы, которые выполняют специализированные организации.
Для установки фундаментов в грунтах вечной мерзлоты с глубоким промерзанием производят завинчивание металлических трубчатых свай специализированным машинным комплексом.
Работы по сооружению фундаментов опор контактной сети и анкеров осуществляют в такой последовательности: изготавливают фундаменты и анкеры на строительной базе или получают готовые; развозят их специальными поездами или внерельсовыми транспортными средствами и устанавливают кранами в заранее подготовленные котлованы; осуществляют вибропогружение свайных фундаментов или бетонируют фундаменты на месте.
Установку фундаментов, анкеров и опор контактной сети выполняют механизированным способом. Опоры контактной сети устанавливают на фундаменты или непосредственно в грунт в подготовленные котлованы. В слабых грунтах под опоры для устойчивости устанавливают опорные плиты.
Наибольшее распространение из существующих железнодорожных кранов для установки фундаментов, анкеров и опор контактной сети получили краны КЖДЭ (КДЭ); КЖС-16 грузоподъемностью 16—25 т (рис. 15.11, а, б).
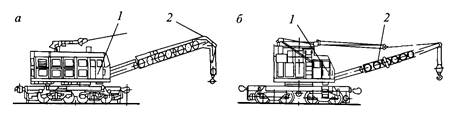
Рис. 15.11. Краны: а — КЖДЭ (КДЭ); б — строительно-монтажный КЖС-16; У — кабина управления; 2 — стрела крана
При работах с поля для установки фундаментов, анкеров и опор используют тракторные краны КТС-5Э, КТС-10Э, КМТТС-10 и др., применяют также автомобильные краны.
Перед установкой фундамента, анкера или опоры в котлован проверяют правильность отметки дна котлована относительно УГР. Крюк крана присоединяют к опоре несколько выше центра тяжести, после чего опору поднимают и опускают в котлован или на фундамент, придавая ей наклон 1,5 % от высоты опоры в сторону, противоположную действию основных нагрузок. Котлован засыпают слоями не более 20 см и тщательно утрамбовывают каждый слой. При работе в зимних условиях обычно засыпают котлован привозным талым грунтом или обязательно размельчают мерзлый грунт так, чтобы его комья были размером не более 5 см.
Свайные фундаменты устанавливают при вибропогружении агрегатом АВСЭ-М, смонтированным на четырехосной платформе (рис. 15.12), или МС (АВФ) (см. рис. 15.9). При этом отпадает необходимость в землеройных работах и значительно ускоряется установка опор контактной сети.
‘На раме платформы АВСЭ-М расположено поворотное устройство агрегата, на котором находится стрела с направляющими для выдвижения и поворота. На конце выдвижной стрелы укреплена конструкция для вертикального перемещения рабочего органа, внутри которой находится вибропогружатель ВП-1 с электродви-
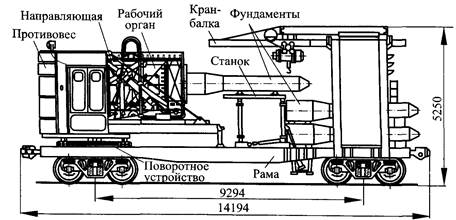
Рис. 15.12. Агрегат вибропогружения свай (вибропогружатель) АВСЭ-М
гателем и гидравлическим захватом. На другом конце платформы расположена поворотная кран-балка с тельфером грузоподъемностью 2 т, позволяющая грузить фундаменты на платформу и устанавливать их на специальный станок посередине платформы. Этим станком фундамент подается в гидравлические захваты рабочего органа. Под кран-балкой укладывается 16—18 фундаментов. Агрегат приводится в действие и транспортируется мотовозом-электростанцией МЭГ-1, на которой имеется трехфазный генератор мощностью 200 кВт.
Агрегат дает возможность погружать свайные фундаменты длиной до 5 м при расстоянии от оси пути 2,7—5,4 м. При погружении в грунт вибропогружателем ВП-1 свайный фундамент подвергается знакопеременным колебаниям с частотой 7 Гц и амплитудой 10—18 мм. За двухчасовое «окно» агрегатом АВСЭ погружают 8—9 свай.
Большой экономический эффект дает использование свайных фундаментов под станционные опоры гибких поперечин. Свайный фундамент из 4—8 железобетонных свай длиной 5—10 м сечением 30×30 или 35×35 см объединяют поверху плитой и соединяют с ней болтами или сваркой (ростверком). Для погружения свай под станционные опоры контактной сети применяют вибропогружатель ВП-30, установленный на железнодорожном кране.
При сооружении больших монолитных фундаментов под опоры гибких поперечин может осуществляться бетонирование фундаментов непосредственно в местах их установки.
Жесткие поперечины на железобетонные опоры устанавливают на оголовники или опорные столики установочным поездом. Он состоит из тепловоза, двух четырехосных платформ (под стрелу крана), крана, сцепа из двух четырехосных платформ для перевозки поперечин и крытого вагона для бригады, материалов и инструмента. Для перевозки поперечин длиной более 24 м сцеп дополняют двухосной платформой.
Поперечины длиной до 20 м опускают на стойки непосредственно с установочного поезда с занятием одного пути. Если длина поперечины более 20 м, то установочный поезд располагают на одном пути, а кран — на соседнем с ним пути. Для установки поперечины осуществляют ее строповку четырехветвевым стропом, закрепленным на расстоянии 3—4,5 м от концов поперечины.
После этого ее поднимают и крепят хомутовыми болтами к оголовкам стоек или опорным столикам.
Строительные работы должны быть выполнены так, чтобы обеспечивалась долговременность эксплуатации сооружаемых устройств. Перед установкой металлические опоры, поперечины и другие металлические конструкции окрашивают по всей поверхности и при необходимости восстанавливают защитные битумные покрытия подземной части поверхности фундаментов, анкеров и железобетонных опор.
Дата добавления: 2015-10-09 ; просмотров: 3762 ;
Источник
Подвижная ж/д установка для вибропогружения свайных фундаментов опор контактной сети
Полезная модель относится к области железнодорожного транспорта и предназначена для механизации работ, связанных с обустройством железнодорожного пути, а именно к машинам на железнодорожном ходу для возведения фундаментов и опор, таких, например, как опоры контактной сети и т.п. Подвижная железнодорожная установка для вибропогружения свайных фундаментов опор контактной сети содержит железнодорожную платформу, выполненную с гидроприводной колесной парой и на которой последовательно расположены гидравлическая станция, связанная с источником энергоснабжения, кабина, с возможностью поворта устройство для вибропогружения, технологический стол с контавателем и кран-манипулятор с рабочим органом и с опорно-поворотным механизмом, при этом приводы перечисленных устройств и механизмов выполнены гидравлическими и подключены к гидравлической станции, опорно-поворотное устройство крана-манипулятора имеет привод с возможностью поворота на 3600, его стрела выполнена телескопической, а рабочий орган выполнен сменным — или в виде вибропогружателя или в виде бура. Задачей, на решение которой направлена полезная модель, является повышение производительности в условиях автономной работы по установке свайных фундаментов опор контактной сети и ее обслуживанию при одновременном улучшении условий труда. Технический результат заключается в выполнении всех рабочих средств и механизмов, связанных с обеспечением функционирования кран-манипулятора и устройства для выбропогружения, с единообразными приводами гидравлического типа, питаемыми от единой гидравлической станции. 3 з.п. ф-лы, 2 ил.
Полезная модель относится к области железнодорожного транспорта и предназначена для механизации работ, связанных с обустройством железнодорожного пути, а именно к машинам на железнодорожном ходу для возведения фундаментов и опор, таких, например, как опоры контактной сети и т.п.
Из уровня техники известна машина для возведения фундаментных опор вдоль железнодорожных путей, содержащая железнодорожную платформу, на которой расположена поворотная платформа с кабиной машиниста и силовым агрегатом. На поворотной платформе установлена грузоподъемная стрела с канатным приводом. На стреле смонтирована вертикально устанавливаемая направляющая рама, связанная с приводом ее управления. На направляющей раме для забивания опор смонтировано рабочее оборудование в виде ударного блока с подъемно-опускным механизмом (см. ЕР 0102322 А, от 07.03.1984).
К недостаткам известной машины следует отнести ограниченный поворот грузоподъемной стрелы, что ведет к невозможности производства монтажных работ по обе стороны железнодорожных путей. Достаточно сложный привод поворота грузоподъемной стрелы подразумевает частое и продолжительное его техническое обслуживание, значительно увеличивая время проведения работ или, в некоторых случаях, делая проведение работ невозможным из-за выхода его из строя.
Наиболее близкой по технической сущности является путевая машина, содержащая железнодорожную платформу с опорно-поворотным устройством, на котором размещен кран-манипулятор с рабочим органом, при этом на платформе дополнительно предусмотрены источник энергоснабжения и гидросистема с возможностью обеспечения функционирования рабочего органа, представляющего собой вибропогружатель (см. RU 55790 U1, от 27.08.2006).
Данная машина имеет ограниченные возможности по производству монтажных работ из-за ограниченного поворота крана-манипулятора, сложности приводов его подъема, раздвижения и поворота.
Задачей, на решение которой направлена полезная модель, является повышение производительности в условиях автономной работы по установке свайных фундаментов опор контактной сети и ее обслуживанию при одновременном улучшении условий труда. Технический результат заключается в выполнении всех рабочих средств и механизмов, связанных с обеспечением функционирования кран-манипулятора и устройства для выбропогружения, с единообразными приводами гидравлического типа, питаемыми от единой гидравлической станции. Это стало возможным за счет возможности поворота телескопического крана-манипулятора
на 360°, что позволяет производить монтажные работы как с любой из сторон железнодорожной ветки, так спереди и позади железнодорожной платформы, унификации основных узлов и механизмов, а именно привода поворота и выдвижения телескопического крана-манипулятора, привода передвижения платформы, приводов устройства для вибропогружения фундаментов опор контактной сети, что является существенным, особенно при работе в автономном режиме в отсутствии дополнительных машин.
Указанный технический результат достигается за счет того, что подвижная железнодорожная установка для вибропогружения свайных фундаментов опор контактной сети содержит железнодорожную платформу, выполненную с гидроприводной колесной парой и на которой последовательно расположены гидравлическая станция, связанная с источником энергоснабжения, кабина, с возможностью поворта устройство для вибропогружения, технологический стол с контавателем и кран-манипулятор с рабочим органом и с опорно-поворотным механизмом, при этом приводы перечисленных устройств и механизмов выполнены гидравлическими и подключены к гидравлической станции, опорно-поворотное устройство крана-манипулятора имеет привод с возможностью поворота на 3600, его стрела выполнена телескопической, а рабочий орган выполнен сменным — или в виде вибропогружателя или в виде бура.
Возможны и другие варианты выполнения полезной модели, согласно которым необходимо, чтобы
— привод бура осуществлялся бы гидромотором, подключенным к гидравлической станции;
— кабина была бы оборудована отопительной и вентиляционной системой;
— гидропривод колесной пары был бы подключен к гидравлической станции и связан с колесами посредством механической передачи.
Указанные признаки полезной модели являются существенными и взаимосвязанными между собой причинно-следственной связью с образованием совокупности существенных признаков, достаточных для достижения технического результата, в частности: выполнение телескопического крана-манипулятора с возможностью поворота на 360° позволило повысить производительность предлагаемого устройства за счет возможности производства монтажных и других работ как с любой из сторон железнодорожной ветки, так спереди и позади железнодорожной платформы. Применение унифицированного гидравлического привода, простых механических редукторов в сочетании с гидромоторами, а также гидроцилиндров выдвижных опор позволило значительно упростить процесс обслуживания устройства привод поворота, подъема и выдвижения телескопического крана-манипулятора, уменьшить энергозатраты, сократить время технического обслуживания и повысить надежность.
Осуществление смены рабочего органа позволило значительно расширить эксплуатационные возможности.
Использование в предложенной комбинации источника энергоснабжения с коробкой передач, раздаточной коробкой и коробкой отбора мощности, связанной с насосом гидросистемы, обеспечивающей функционирование гидромотора привода опорно-поворотного устройства, гидроцилиндров подъема и выдвижения телескопической стрелы и гидромотора рабочего органа позволило полностью автономизировать рабочий процесс и значительно снизить энергозатраты за счет оптимизации компоновки.
Следует отметить, что предлагаемый комплекс позволяет значительно ускорить рабочий процесс по возведению фундаментов опор контактной сети, поскольку позволяет за счет смены рабочего органа исключить использование нескольких путевых машин. Установка позволяет производить технологическую подготовку мест для размещения опор фундамента и их установку, не меняя рабочего положения железнодорожной платформы.
Выполнение платформы подвижной и снабжение ее установкой для вибропогружения свайных фундаментов опор контактной сети, гидравлической станцией, связанная с источником энергоснабжения, кабиной, устройством для вибропогружения, смонтированное на опорно-поворотном механизме, технологическим столом с контавателем и кран-манипулятором со сменным рабочим органом, позволяет быстро и экономично производить подготовку мест для установки фундаментов и их установку. Выполнение рабочего органа в виде вибропогружателя позволяет значительно повысить производительность предлагаемого комплекса и уменьшить ее энергозатраты по сравнению с путевыми машинами, оборудованными ударными блоками с подъемно-опускными механизмами за счет исключения холостого хода инерционных масс рабочего органа.
Выполнение рабочего органа в виде вибропогружателя ведет, также, к расширению эксплуатационных возможностей, поскольку позволяет не только устанавливать, но и извлекать раннее установленные опоры.
Применение вибропогружателя со синхронизирующимися реверсивными дебалансами позволяет создать вибрационные режимы как с большим статическим моментом и низкой частотой, так и с малым статическим моментом и повышенной частотой.
Далее предлагаемая полезная модель будет раскрыта более подробно, со ссылкой на графические материалы, на которых:
фиг.1 — принципиальная схема подвижной железнодорожной установки для вибропогружения свайных фундаментов опор контактной сети;
фиг.2 — вид А по фиг.1.
Согласно полезной модели подвижная железнодорожная установка для вибропогружения свайных фундаментов опор контактной сети содержит железнодорожную платформу 1 (фиг.1, 2), выполненную с гидроприводом 2 колесной пары 3 для обеспечения автономного перемещения на небольшие расстояния. На платформе 1 последовательно расположены
гидравлическая станция 4, связанная с источником энергоснабжения 5, кабина 6 с системой отопления и вентиляции, устройство 7 для вибропогружения, смонтированное на опорно-поворотном механизме 8, технологический стол 9 с контавателем 10 и кран-манипулятор 11 с рабочим органом 12. При этом с целью унификации деталей установки приводы перечисленных устройств и механизмов выполнены гидравлическими и подключены к гидравлической станции 4 кинематически связанной с источником энергоснабжения 5. Применение автономного источника энергоснабжения обеспечивает энергонезависимость предлагаемой установки и жизнедеятельность.
Опорно-поворотное механизм 8 предназначен для обеспечения поворота крана-манипулятора 11 на железнодорожной платформе 1 в течение всего рабочего процесса в диапазоне 360°, а также перевода крана-манипулятора 3 из транспортного положения в рабочее и наоборот. Таким образом все работы могут быть легко выполнены с любой стороны от железнодорожной платформы, вне зависимости от места ее расположения.
Опорно-поворотный механизм 8 имеет привод от гидромотора через механический редуктор (на чертежах не показано). На опорно-поворотном механизм 8 размещен кран-манипулятор 11 со сменным рабочим органом 12, причем стрела крана-манипулятора 11 выполнена телескопической и также оснащена гидроприводом ее перемещения, выполненным в виде гидроцилиндров подъема и выдвижения. Такое решение обеспечивает надежное, быстрое и точное изменение положения рабочего органа, значительно сокращая при этом время технического обслуживания и повышая надежность, по сравнению с известными решениями.
Рабочий орган 12 выполнен сменным — или в виде вибропогружателя, включающего вибратор, содержащий корпус, соединенный с гидравлическим зажимным устройством, смонтированные в корпусе валы со сборными дебалансами, связанные друг с другом синхронизирующими зубчатыми колесами, грузовую траверсу и виброизолятор, установленный между вибропогружателем и краном-манипулятором, или в виде бура.
В одном из вариантов выполнения источник энергоснабжения 5 соединен с коробкой передач и раздаточной коробкой, связанной с насосом гидравлической станции 4, который снабжен распределительным устройством, управляемым оператором, и обеспечивает функционирование различных гидроприводов установки, гидромотора привода опорно-поворотного устройства 8, гидроцилиндров подъема и выдвижения телескопической стрелы и гидромотора (гидромоторов) рабочего органа 12.
Предлагаемая компоновка энергоснабжения обеспечивает не только самоходность железнодорожной платформы, но и энергонезависимость устройства 7 для вибропогружения, крана-манипулятора 11 и рабочего органа 12, а также возможность одновременного снабжения энергией всех узлов установки.
Наличие кран-манипулятора 11 существенно расширяет возможности установки — все указанные работы могут быть легко выполнены с любой стороны железнодорожной платформы, вне зависимости от места ее расположения за счет поворота стрелы на 360°.
Подвижная железнодорожная установка предназначена для установки с ж/д пути свайных фундаментов опор при обустройстве и ремонте контактной сети железных дорог и работает следующим образом.
Железнодорожная платформа подается к месту проведения работ. На железнодорожной платформе предусмотрено место для складирования предназначенных для установки или извлечения опор (фундамента) или может быть предусмотрена дополнительная грузовая платформа для указанных целей. Кран-манипулятор переводятся из транспортного в рабочее положение.
В зависимости от того, какие работы должны быть произведены, на крюк крана-манипулятора навешивается соответствующий рабочий орган — для формирования и подготовки мест для установки свайных фундаментов и опор контактной сети в качестве рабочего органа используется бур, а для погружения и/или извлечения свайных фундаментов и опор контактной сети в качестве рабочего органа используется вибропогружатель.
В качестве вибропогружателя может быть использован, например, вибропогружатель, представляющий собой вибрационную машину, состоящую из вибратора, гидравлического зажимного устройства, грузовой траверсы и виброизолятора.
Основной частью такого вибропогружателя является вибратор, состоящий из корпуса и вмонтированных в него двух валов с установленными на них шестернями и дебалансами. Привод вибратора осуществляется зубчатой передачей от двух гидромоторов.
Колебания возникают от синхронного вращения двух пар дебалансов, центробежные силы которых уравновешиваются в плоскости, перпендикулярной оси погружаемого элемента, а вдоль оси элемента суммируются и создают знакопеременную возмущающую силу.
Колебания вибратора передаются через жестко закрепленное на нем гидравлическое зажимное устройство погружаемому (извлекаемому) элементу. В зависимости от частоты и направления вращения дебалансных валов обеспечиваются различные режимы погружения (извлечения) фундаментов или опор.
Таким образом, предлагаемые конструкция и компоновка заявляемого комплекса являются простыми и надежными, способствующими повышению производительности, уменьшению энергозатрат и сокращению времени технического обслуживания, расширению эксплуатационных возможностей за счет возможности смены рабочего органа, а также повышению надежности.
1. Подвижная железнодорожная установка для вибропогружения свайных фундаментов опор контактной сети содержит железнодорожную платформу, выполненную с гидроприводной колесной парой и на которой последовательно расположены гидравлическая станция, связанная с источником энергоснабжения, кабина с возможностью поворота устройства для вибропогружения, технологический стол с контавателем и кран-манипулятор с рабочим органом и с опорно-поворотным механизмом, при этом приводы перечисленных устройств и механизмов выполнены гидравлическими и подключены к гидравлической станции, опорно-поворотное устройство крана-манипулятора имеет привод с возможностью поворота на 360°, его стрела выполнена телескопической, а рабочий орган выполнен сменным — или в виде вибропогружателя, или в виде бура.
2. Установка по п.1, отличающаяся тем, что привод бура осуществляется гидромотором, подключенным к гидравлической станции.
3. Установка по п.1, отличающаяся тем, что кабина оборудована отопительной и вентиляционной системой.
4. Установка по п.1, отличающаяся тем, что гидропривод колесной пары подключен к гидравлической станции и связан с колесами посредством механической передачи.
Источник